Seconda traccia - 5° geofono a distanza di una quindicina di metri dal punto di battuta,
durata di acquisizione 1500 m.sec secondi, frequenza di campionamento 1000 hz.
28-09-2015
Spesso si usa come starter il geofono fidandoci che inneschi il processo di acquisizione nell'esatto istante in cui si è dato lo start, non sempre la cosa è sempre vera.
Si consiglia di provare il sistema prima con uno starter ON / OFF poi con il geofono per vedere se il tempo del primo arrivo è sempre lo stesso, consiglio di dare mazzate deboli, medie , forti e fortissime per verificare che i tempi siano sempre gli stessi
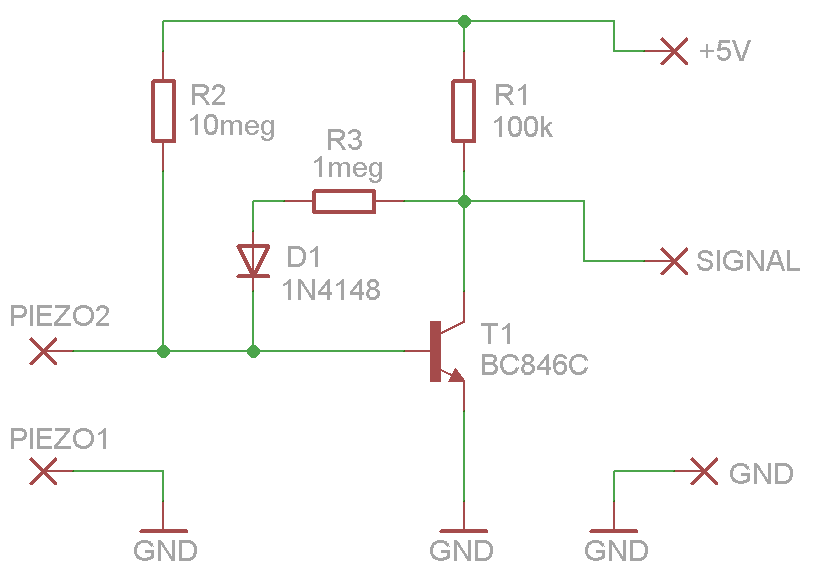
Consiglierei lo starter Piezo che da valori bassi sempre e supera il 500 solo durante il colpo.
In questo modosi potrà usare un qualunque input digitale ( DigIn )
che è valido per tutti i PIN di tutti i moduli (anche fino agli 11 e 12 dei nuovi master)
In questo modo con n° 2 Theremini è possibile realizzare un 12 canali in quanto come canale trigger può essere utilizzato il pin 7,8,9,10,11,12 deni nuovi master > V 4.0
Il programma in fase di realizzazione riconoscerà
Attenzione a girare il dischetto piezo fisicamente nel senso giusto
in modo che dia il segnale al fronte di salita del colpo
e non al fronte di discesa, che arriverebbe qualche millisecondo dopo.
Come funziona ?il geofono quando è in quiete genera un segnale di ampiezza molto piccola, quando viene eccitato da una mazzata produce segnali di ampiezza elevata mandando spesso in saturazione il segnale se non ben regolato.
Il funzionamento è quello di sfruttare questa proprietà, quando il segnale supera il valore di soglia il software se ne accorge e da l'ordine al sismografo di far partire la procedura di acquisizione, nel caso contrario rimane in attesa.
Senza addentrarci nelle diverse tecniche utilizzate nel gestire via software o via hardware lo starter, l'operatore deve conoscere i limiti del metodo per non rischiare di ottenere risultati errati.
Importante è in valore di soglia che determina il valore in cui deve avvenire lo starter dell'acquisizione, se ci riferiamo alla figura precedente traccia superiore che mostra il grafico dell'andamento del segnale generato da un geofono eccitato da una mazzata posizionato nelle vicinanze della piastra di battuta si possono ipotizzare diversi comportamenti.
1) ipotizziamo ( caso rarissimo ) dove il rumore ambientale = 0, e di aver impostato il valore di soglia = 0,01, nell'esatto istante in cui si a da mazzata scatta la procedura di acquisizione come si vede in figura ( tacca rossa )
Il geofono posto ad una certa distanza evidenzierà il primo arrivo delle onde P dopo un certo intervallo di tempo dT che è quello trascorso dall'istante 0 e il tempo Tr ritardo.
Per eseguire questa prova nel software è stato inserito un pretrigger che mostra il segnale prima dello starter ( parte sinistra della linea rossa )
caso 2) normalmente il rumore di fondo del sito non avrà mai un valore = 0 , i microtremori ce lo insegnano, quindi se imponiamo un il valore di soglia indicato nel caso 1 di 0,01 avviata la procedura di attesa della mazzata al primo tremolio del terreno avviene il superamento della procedura di acquisizione senza aver dato la mazzata rendendo nulla l'acquisizione fatta.
caso 3) Nel caso della figura precedente dovessimo impostare un valore di soglia pari a 15, valore superiore almeno di 5 volte del rumore ambientale che varia nell'esempio varia tra +/- 2 avremo l'avviamento dell'acquisizione ma con un piccolo ritardo valutabile fra 1 e 5 millisecondi, tale errore produce una sottovalutazione del tempo di arrivo della onda P, di conseguenza una sovrastima della Vp.
caso 4) Nel caso in cui la parte positiva dell'esempio fosse stata quella rivolta verso il basso e con valore di soglia = 30 si ottiene un tempo di starter errato che genera un errore grossolano nella determinazione del tempo T0, il dT si sarebbe praticamente dimezzato rispetto al dT reale con conseguente sovrastima della vs anche in questo caso.
caso 5) A livello di software e in maniera più complicata a livello di Hardware è possibile usare il modulo del valore di soglia, ciò permette al trigger di funzionare anche con polarità invertite del segnale di starter.
Se la polarità dei geofoni nei casi 1 - 4 fosse stata invertita, usando i valori di soglia precedentemente indicati non avrebbero fatto partire l'acquisizione in quanto un valore -30 , ad esempio, non avrebbe soddisfatto le condizioni di avvio dell'acquisizione.
Usando il modulo ciò viene resa possibile ma senza migliorare il risultato finale
caso 6) aumentando a 60 il valore soglia , è evidente che ci troviamo in una condizione sempre peggiore a quelle precedenti il tempo To sarebbe maggiore al tempo di arrivo del segnale registrato dal geofono con conseguente perdita della parte iniziale del segnale.
caso 7) L'ultimo caso è duello di usare un valore di soglia più alto del valore massimo prodotto dal geofono starter, in tal caso l'acquisizione non parte in quanto la relazione che avvia l'acquisizione non viene verificata.
CONCLUSIONI SULL'USO DEL GEOFONO START
Come si è visto i migliori dati si hanno quando il valore di soglia si pochissimo il rumore del sito quel tanto che basta per far scattare il trigger a causa di un rumore antropico.
Per migliorare la funzionalità del geofono trigger è possibile inserire un circuito che abbia il compito , facendo ruotare una manopola per regolare la sensibilità del trigger in modo da evitare partenze dell'acquisizione, in tutti i casi ciò fa comportare uno delle problematiche dei casi 2-7 precedentemente descritti.
Quanto detto va contro a quanto spesso viene consigliato di dare la mazzata vicino al geofono che si vuole usare come punto di start, in particolare per la mazzata centrale che si solito va data tra il 6 e 7 geofono.
Non è possibile neanche settare il trigger per determiati valori di soglia perchè dipendono
1) dalla caratteristiche del geofono - sensore usato
2) amplificazione e sensibilità del sistema usato
3) intensità della mazzata
4) rumore ambientale
5) energia sviluppata del mezzo battente ( forza applicata )
6) tipo di terreno
7) tipo e dimensioni della piastra
8) distanza dal centro della piastra e il geofono
9 valore di soglia impostato
10) sall'algoritmo utilizzato per gestire l'evento a livello Hardware che software
11) .......... altro ...............
Per ottimizzare ciò occorrono algoritmi software (che penso non vengano utilizzati nei normali strumenti) che eseguano test e verifiche in fase di acquisizione e l'individuazione del vero istante T0 con l'analisi post acquisizione del dato prima della sua visualizzazione, saranno tecniche sperimentate nel programma di acquisizione, in pratica occorre realizzare un " triggeraggio intelligente".
Anche se in maniera meno evidente tutti le tecniche do triggeraggio chi più e chi meno hanno questi problemi più o meno evidenti, per tanto tecniche di triggeraggio intelligenti possono ridurre i margini di errore.





























.png)



















